生産システムデザイン研究室
教員
廣垣 俊樹(教授)Toshiki HIROGAKI
DB| 研究分野 | 自動化・自律化に基づく設計・生産システム |
|---|---|
| 研究室 | YM-503 |
| TEL | 0774-65-6503 |
| FAX | 0774-65-6503 |
| 研究室のHP | https://msdl.doshisha.ac.jp/ |
| thirogak@mail.doshisha.ac.jp |
中川 正夫(准教授)Masao NAKAGAWA
DB| 研究分野 | メカトロニクスによるものづくりの高度化 |
|---|---|
| 研究室 | YM-502 |
| TEL | 0774-65-6479 |
| 研究室のHP | https://msdl.doshisha.ac.jp/ |
| manakaga@mail.doshisha.ac.jp |
研究内容
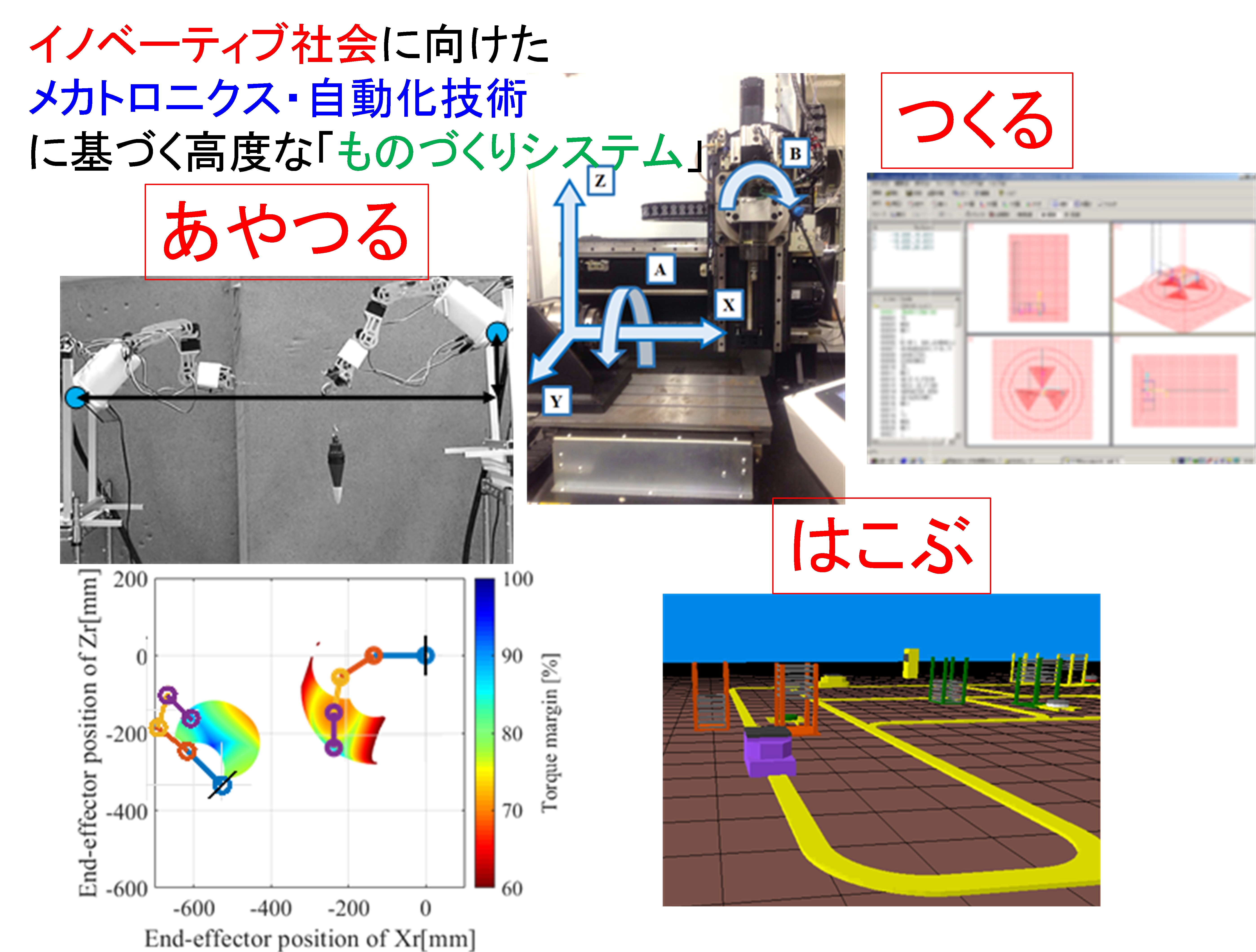
図1 社会の変革に適応するイノベーティブなものづくりシステムの構築
1.自動メカトロニクス技術によるCAD/CAM/CNC工作機械や産業用ロボットの統合システム
人間の身の回りある交通システムなどの自律・分散・協調的な知識を自動搬送車(AGV)ロボットに適用し、賢いロボット搬送がデジタルものづくりを支援する技術の開発(図2)を試みている。つながる工場・つながる社会におけるネット通販などの自動物流倉庫等における、不確定な指令下におけるAGV搬送制御に関する研究(図3)を遂行している。
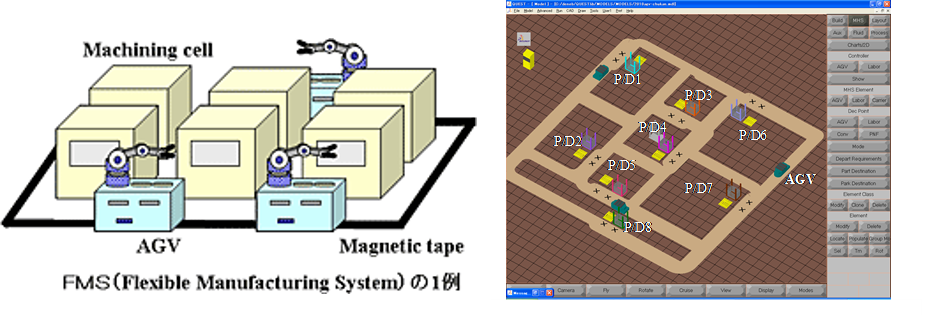
図2 マシニングセルとロボット搬送の統合システムや物流自動倉庫のAGVシミュレーション
の開発
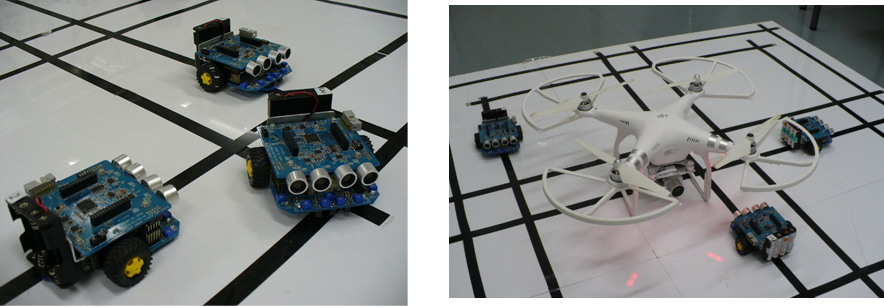
図3 実験に使用する移動ロボットの例
造船や建設現場などのパイプ配管設置には、最終接続の工程で特注の配管パイプが必要となるが,その製造には現場のカン・コツに基づく技能が不可欠であった。その問題を払拭するため、大型産業用ロボットの自由な位置・姿勢動作を活用した配管検査システムを開発し、3D・CAD設計データに基づく新たな配管製造システムの構築(図4)を遂行している.
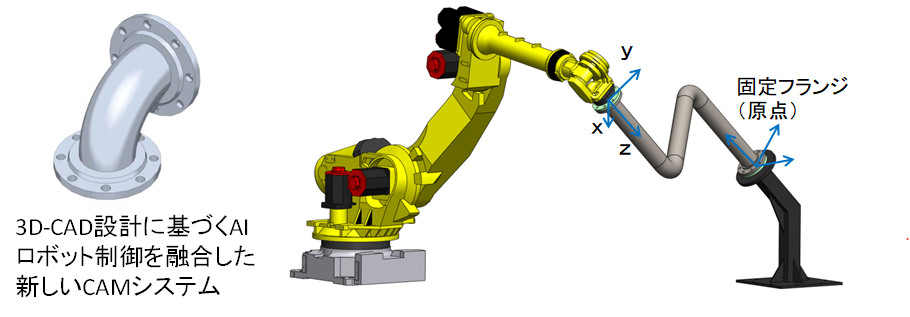
AIに支援されたロボットの姿勢位置決め運動に基づく配管検査法
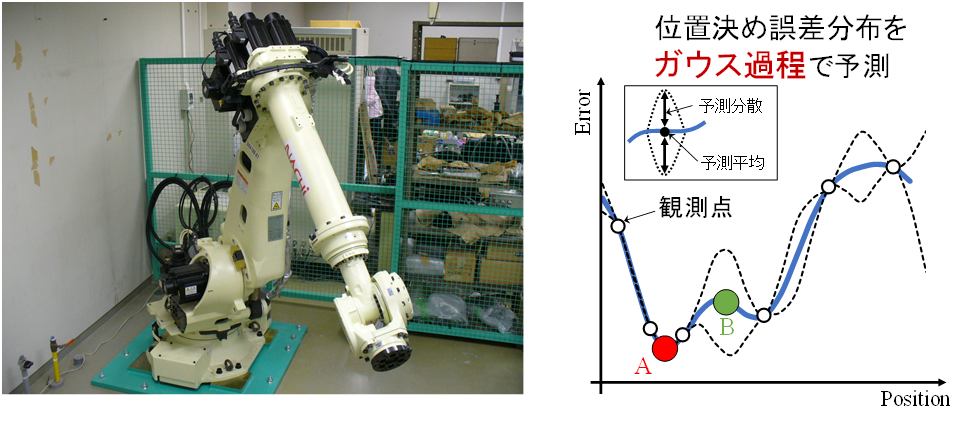
実験用の大型産業用ロボットと現場のカン・コツの機械学習制御の開発
図4 造船・建設現場用のロボット統合CAD/CAMシステムの開発
自由曲面の創成運動を制御するCAMとして、3軸制御または5軸制御(並進3軸+回転2軸)工作機械の同期制御軸CL(Cutter Location)決定法に関する研究(図5)を遂行している.
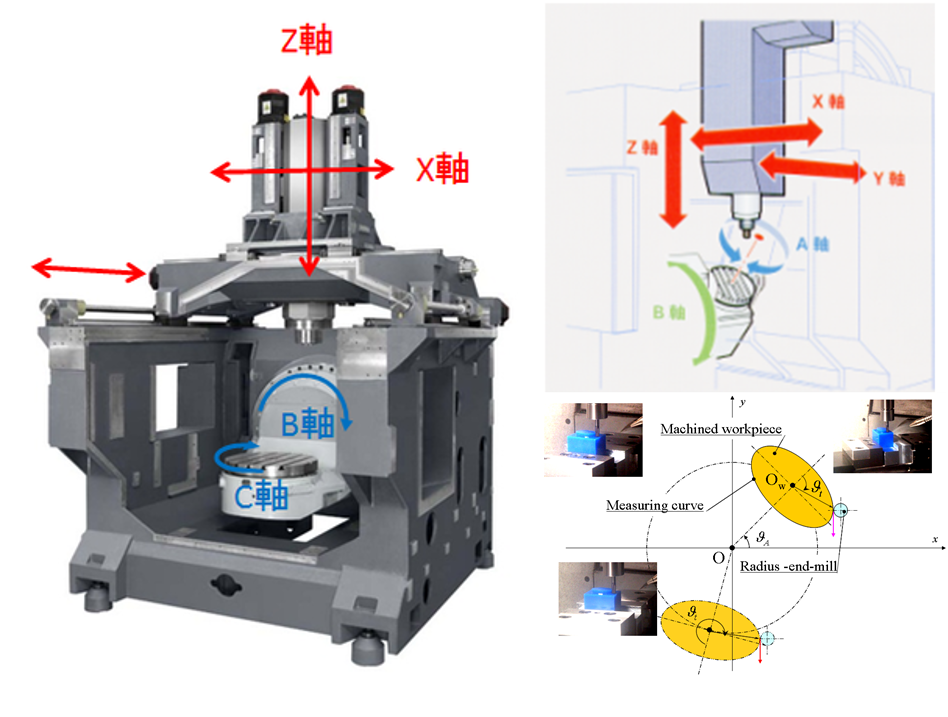
図5 5軸制御マシニングセンタとその制御軸の例
人の高度な動作は双腕の協調に基づく道具の操り動作が多い。そこで様々なタイプの双腕ロボットの協調動作や2台のロボットの配置を様々変更しての双具の操り協調動作に取り組んでいる.図6は多関節産業双腕ロボットによる作業プレートの操り動作と産業用スカラー双腕ロボットの動作開発の例である。図7は2台の多関節ロボットのワイヤードライビング動作時の最適配置の検討、産業用ヒューマノイドロボットのサウンドフィードバック制御に基づく楽器などの高度な道具の操り動作の開発例である。
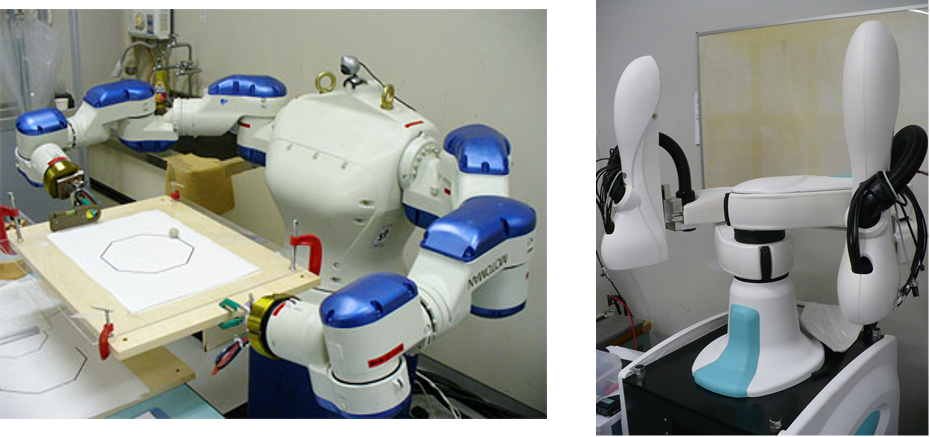
図6 多関節やスカラー双腕ロボットによる作業プレートの操り動作
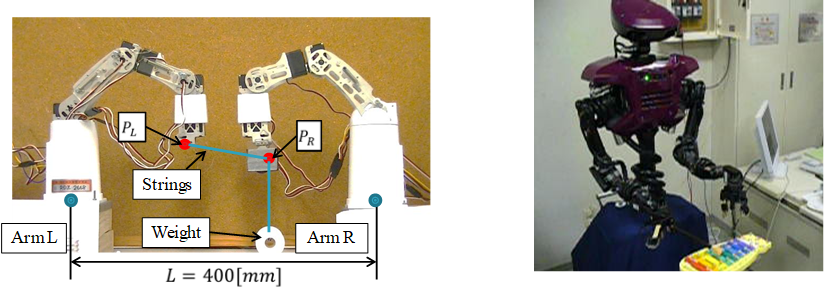
図7 複数台の多関節ロボットや産業用ヒューマノイドロボットによる道具の操り動作の開発
設計と生産現場のビッグデータに対するデータマイニング・AI機械学習等の応用(図8)。さらにWEBカメラなどの画像の機械学習・2次元フーリエ変換を応用し、人の視覚判断を凌駕する加工面のリモート診断に基づく工作機械の制御方法の開発(図9)の例を示す。
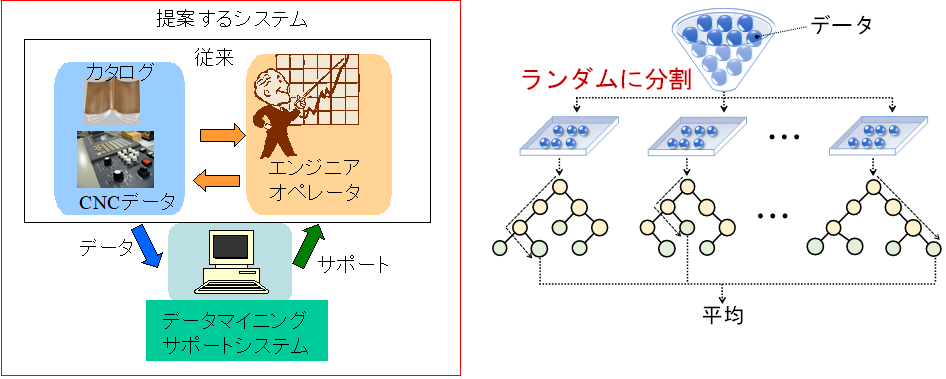
図8 ものづくり現場のビッグデータに対するデータマイニングに支援されたものづくりシステム
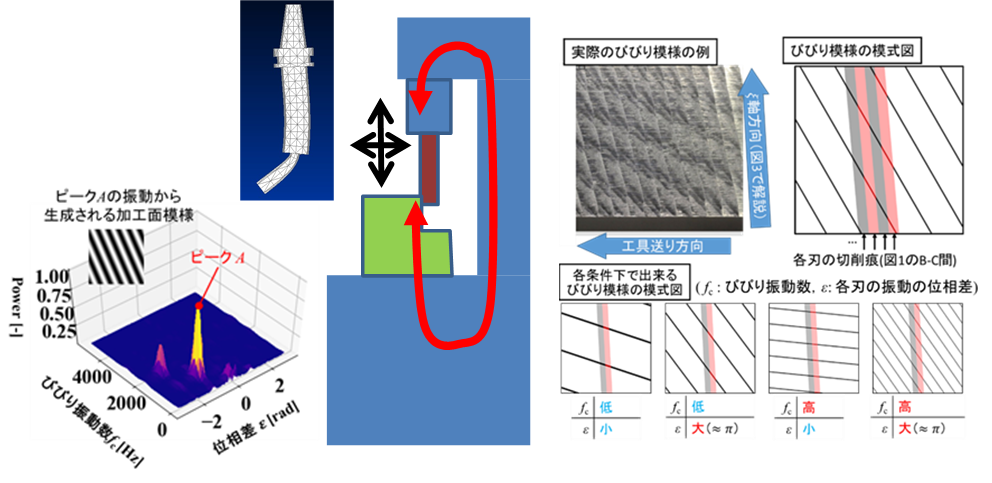
図9 空間周波数画像(2次元フーリエ変換)診断法に基づくリモートワークでの工作機械のびびり振動抑制
2.デジタル伝統技能の自動化と地球環境負荷を考慮したサステイナブル生産システムの開発
日本の伝統技能のデジタル化に基づき,微粉超砥粒砥石と加工物の相対運動と定圧制御を組み合わせることで、仕上げ面表面に創生される表面幾何形状の制御に取り組んでいる(図10)。また薄鋼板に対する「折り紙工学」の具現化(図10)に向け,レーザ照射制御するレーザ焼入れフォーミング法の研究開発に取り組んでいる。
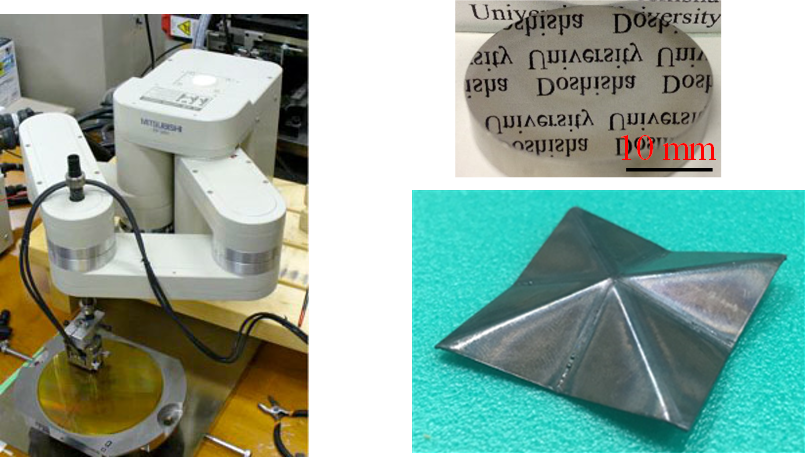
図10 5節閉リンクロボットによる磨き動作の開発/折り紙工学に向けたレーザ焼き入れフォーミング
CAMとNC(数値制御)でエンドミル加工後の切くず形状を制御し、高品質で均一なファイン竹繊維の抽出を行っている。本研究は竹資源の生長から製品化・製品の廃棄まで製品ライフサイクルをLCA解析で評価しながら、次世代のサステイナブル生産システム(図11)を目指すものである。そのプロセス最適化には機械学習などのAIを積極的に導入している。

図11 竹の自己成長性に着目したサステイナブル生産システム
3.人と機械の協調に向けた動力伝達用機構の最適設計・状態診断の手法
電動アシスト自転車などモータ等による人の動作のパワーアシストシステムが多用(図12)されてきている。またハイブリッド自動車など、エンジン・モータ・発電機などの複数入出力システムの普及が著しい.それらに必要となる差動遊星歯車機構(図13)の運動メカニズム解明(図14)を進めている。
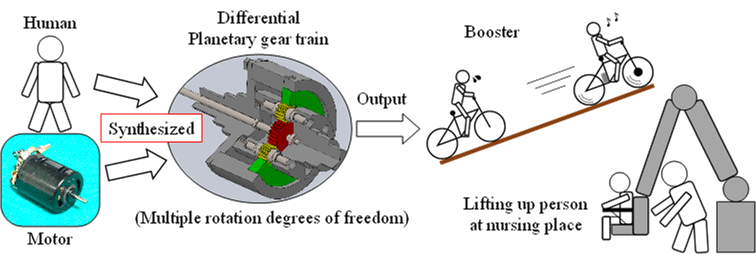
図12 人と機械の協調を目指した差動遊星歯車機構の応用
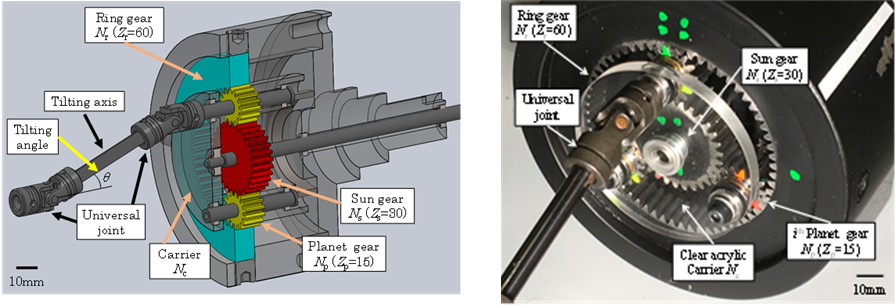
図13 新しい差動遊星歯車機構の提案と機構内部の運動可視化
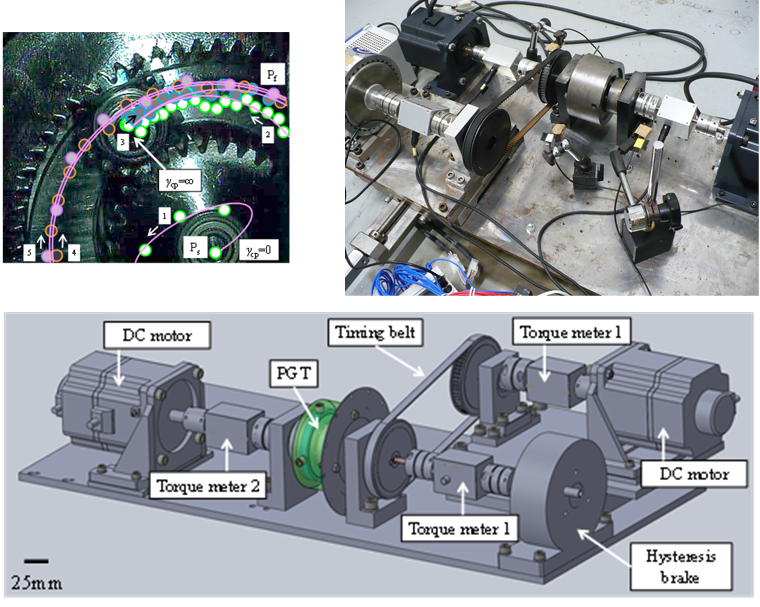
図14 差動遊星歯車機構の評価装置と遊星歯車の画像追尾法による運動の解明
動力伝達機構である歯車のかみあいの診断には、伝統的に歯面にペイントを塗布して視覚画像に基づく歯当たり試験が多用されてきた。本研究では,歯車の歯のかみあいの際に発生する微小な発熱を赤外線サーモグラフィ画像で高精度に効率的にモニターし、人の視覚検査を凌駕する赤外線画像診断法(図15)の開発に取り組んでいる。
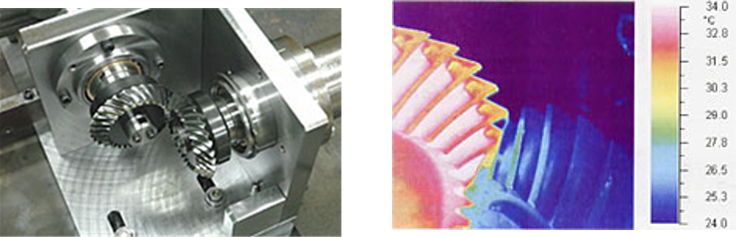
図15 ハイポイドギヤ駆動装置と赤外線サーモグラフィによる歯当たりモニタ診断
食品機械などで潤滑油レスのクリーンな環境で使用可能な人にやさしい歯車伝達機構が求められている。そこで潤滑レスで使用可能な新素材として竹繊維100%のオーガニック歯車を提案して、その設計諸元の決定(図16)から動力伝達特性までの評価(図17)を遂行している。
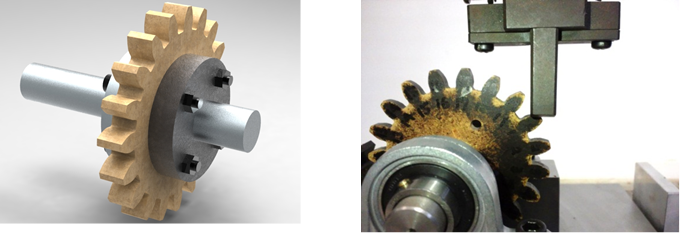
図16 竹繊維のみのオーガニック平歯車CAD設計と歯の強度試験の例
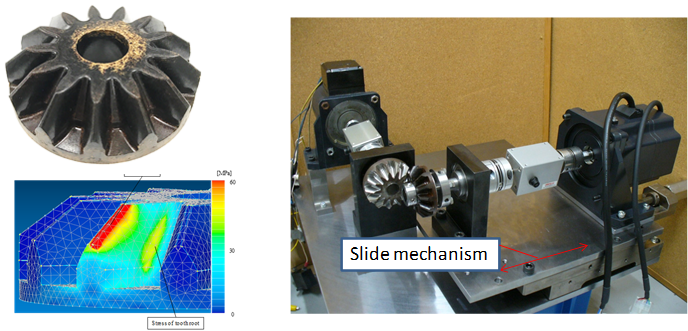
図17 竹繊維のみのオーガニックベベルギヤと歯の応力解析と駆動装置の例
4.ダウンサイジング社会に向けた技術とプロセスモニタリング
携帯情報端末機器の小型化・高機能化の市場ニーズに応えるため、内蔵されるプリント基板のマイクロ加工にも高度な加工技術が要求されてきている。特に超高速で回転するマイクロドリルの高速高精度な運動制御には高度な制振技術が必要(図18)となる。また機械の小型化(ダウンサイジング)が工作機械にも求められており、従来の概念を払拭するデスクトップサイズの5軸制御工作機械(図18)や超多機能工作機械(図19)などにより、省電力で地球環境負荷にやさしい機械の開発を遂行している。
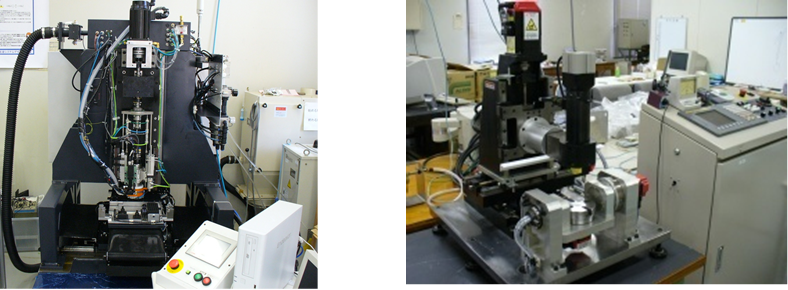
図18 25万回転スピンドル搭載のカウンターバランス制振工作機械や5軸制御ダウンサイズ工作機械の例
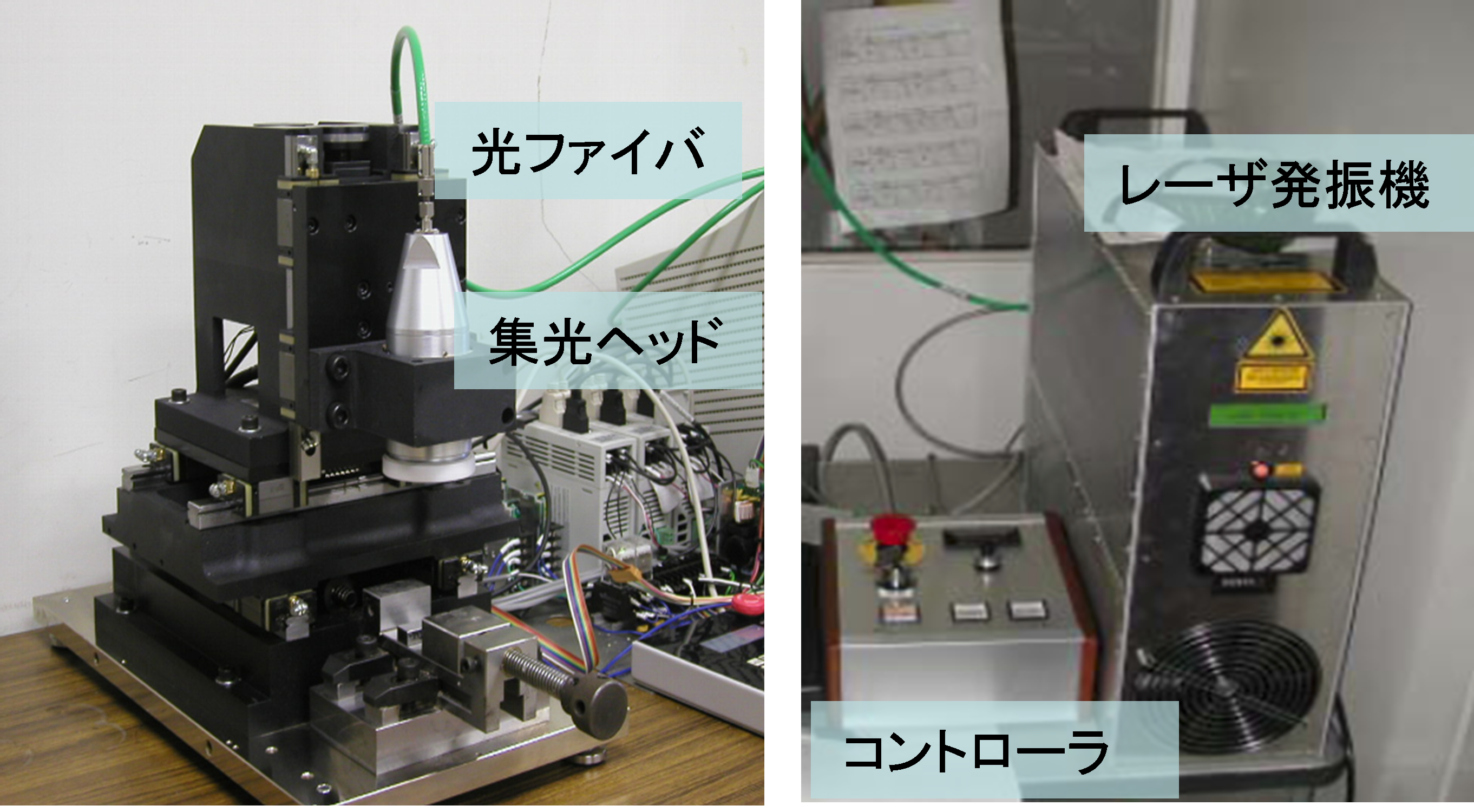
図19 レーザ熱源も搭載可能な超多機能ダウンサイズ工作機械の開発例
IoTでつながる工場・つながる社会の具現化のためには、ワイヤレス無線通信機能の充実が不可欠である.工場におけるプロセスモニタに無線通信機能を活用する技術開発(図20)を進めている。また並行して、赤外線画像を活用したプロセスモニタ技術の開発(図20)も進めている。さらに携帯情報端末機器の小型化・高機能化の市場ニーズに応えるため、内蔵されるプリント基板のマイクロ加工にレーザ熱源も多用されているが、その照射の制御法の開発のため、そのプロセスの診断に高速度ビデオモニタと画像二色法の適用も試みている(図21)。
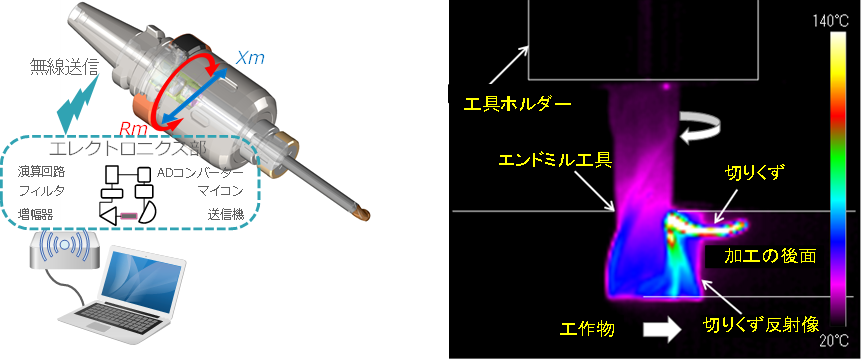
図20 プロセスモニタ用無線工具ホルダーシステムの開発と赤外線サーモグラフィ画像の診断法
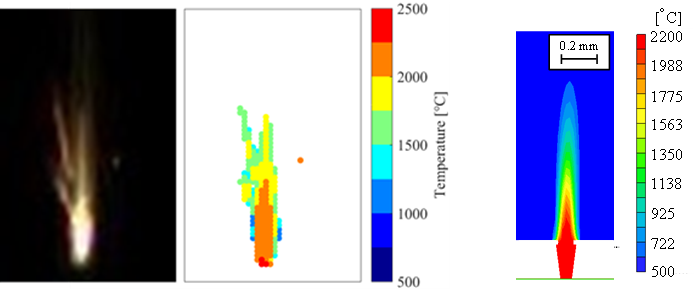
図21 マイクロ穴あけプロセスの高速度ビデオモニタと画像2色法による状態診断とそのシミュレーション