以下、本文になります
機械力学研究室
教員
辻内 伸好(教授)Nobutaka TSUJIUCHI
DB| 研究分野 | 運動と振動の制御及びロボティクスの高度化 |
|---|---|
| 研究室 | YM-423 |
| TEL | 0774-65-6493 |
| FAX | 0774-65-6493 |
| 研究室のHP | https://moavic.doshisha.ac.jp/ |
| ntsujiuc@mail.doshisha.ac.jp |
伊藤 彰人(教授)Akihito ITO
DB| 研究分野 | ロボットシステムの高度化に関する研究 |
|---|---|
| 研究室 | YM421 |
| TEL | 0774-65-6230 |
| FAX | |
| 研究室のHP | https://moavic.doshisha.ac.jp/ |
| aito@mail.doshisha.ac.jp |
研究内容
当研究室では、動的現象に関するさまざまな研究を行っている。それらは、機械構造物を対象としたダイナミクスに関するモード解析や、振動・騒音問題の解決、現代制御を用いた腕や手先の機能を持つマニピュレータコントロール、新素材あるいは新技術を用いたアクチュエータやセンサの開発、さらに人体のモデル化にもとづく用具や装具の開発などであり、実験・解析シミュレーションの両面からアプローチを試みている。
具体的なテーマと最近の結果に関する図を以下に示す。
具体的なテーマと最近の結果に関する図を以下に示す。
Ⅰ.機器・装置の振動騒音低減(図1)
逆音響解析手法の開発とエンジン騒音予測
ななめ型洗濯機のモデル化と低振動化
クランク機構を用いた鉛直免震台の開発
自動車振動の伝達経路分析と低騒音化評価技術開発
逆音響解析手法の開発とエンジン騒音予測
ななめ型洗濯機のモデル化と低振動化
クランク機構を用いた鉛直免震台の開発
自動車振動の伝達経路分析と低騒音化評価技術開発
Ⅱ.乗用車,二輪車,大型車両のダイナミクス(図2)
タイヤノイズの発生メカニズムの解明
大型重機の掘削シミュレーションと最適軌道による自動掘削
大型重機のリモートアシスト制御システムの構築
自動車用の駆動系に生じる非線形振動のモデル化
自己駆動粒子挙動を用いた非常時避難モデルの提案
タイヤノイズの発生メカニズムの解明
大型重機の掘削シミュレーションと最適軌道による自動掘削
大型重機のリモートアシスト制御システムの構築
自動車用の駆動系に生じる非線形振動のモデル化
自己駆動粒子挙動を用いた非常時避難モデルの提案
Ⅲ.ロボットのダイナミクスとその制御(図3)
筋電信号による義手制御法の開発
柔軟物体のモデリングとロボットによるハンドリング
冗長マニピュレータを用いた物体把持戦略
慣性センサを用いたロボットのダイレクトティーチング
カメラ協調による産業用ロボットのマテハン技術の高度化
取り出しロボットの振動抑制制御法の開発
歩行アシスト装置の定量的評価手法の開発
筋電信号による義手制御法の開発
柔軟物体のモデリングとロボットによるハンドリング
冗長マニピュレータを用いた物体把持戦略
慣性センサを用いたロボットのダイレクトティーチング
カメラ協調による産業用ロボットのマテハン技術の高度化
取り出しロボットの振動抑制制御法の開発
歩行アシスト装置の定量的評価手法の開発
Ⅳ.人体のモデル化,スポーツダイナミクス(図4-1,図4-2)
ウェアラブル全身計測システムの開発と人体運動解析
幼児事故・虐待の人体FEMモデルによる解析と防止
ゴルフクラブの物理特性と人体応答との結合
ヒトの歩行・走行遷移時のシナジー解析
重心動揺計における重心フィードバック効果の力学的検討
トラクタ乗り降り動作の疲労解析
ウェアラブル全身計測システムの開発と人体運動解析
幼児事故・虐待の人体FEMモデルによる解析と防止
ゴルフクラブの物理特性と人体応答との結合
ヒトの歩行・走行遷移時のシナジー解析
重心動揺計における重心フィードバック効果の力学的検討
トラクタ乗り降り動作の疲労解析
Ⅴ.宇宙生体医工学研究プロジェクト関連研究(図5)
低重力下での人体運動解析
ウェアラブル全身計測システムを利用したリハビリ効果の評価
自走式トレッドミルの開発とサルコペニア発生原因の解明
月面重力模擬装置の開発(制御と懸垂治具の開発)
低重力下での人体運動解析
ウェアラブル全身計測システムを利用したリハビリ効果の評価
自走式トレッドミルの開発とサルコペニア発生原因の解明
月面重力模擬装置の開発(制御と懸垂治具の開発)
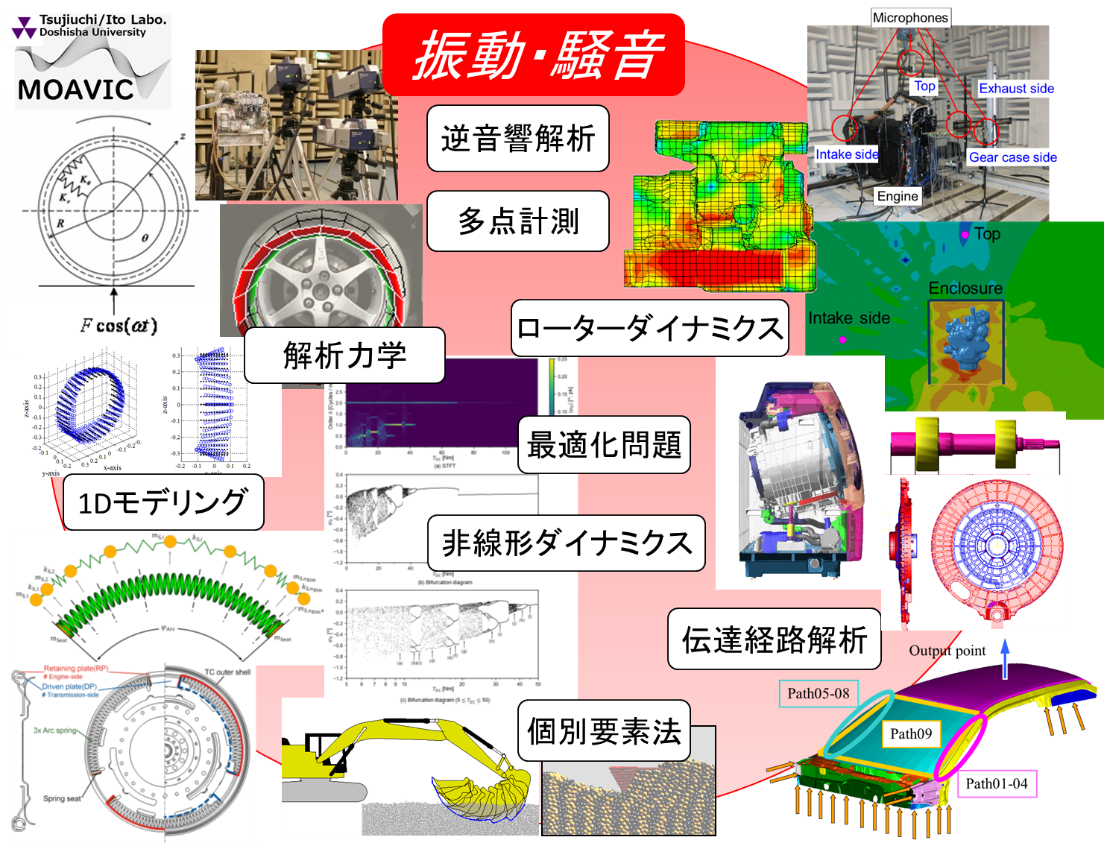
図1 機器・装置の振動騒音低減
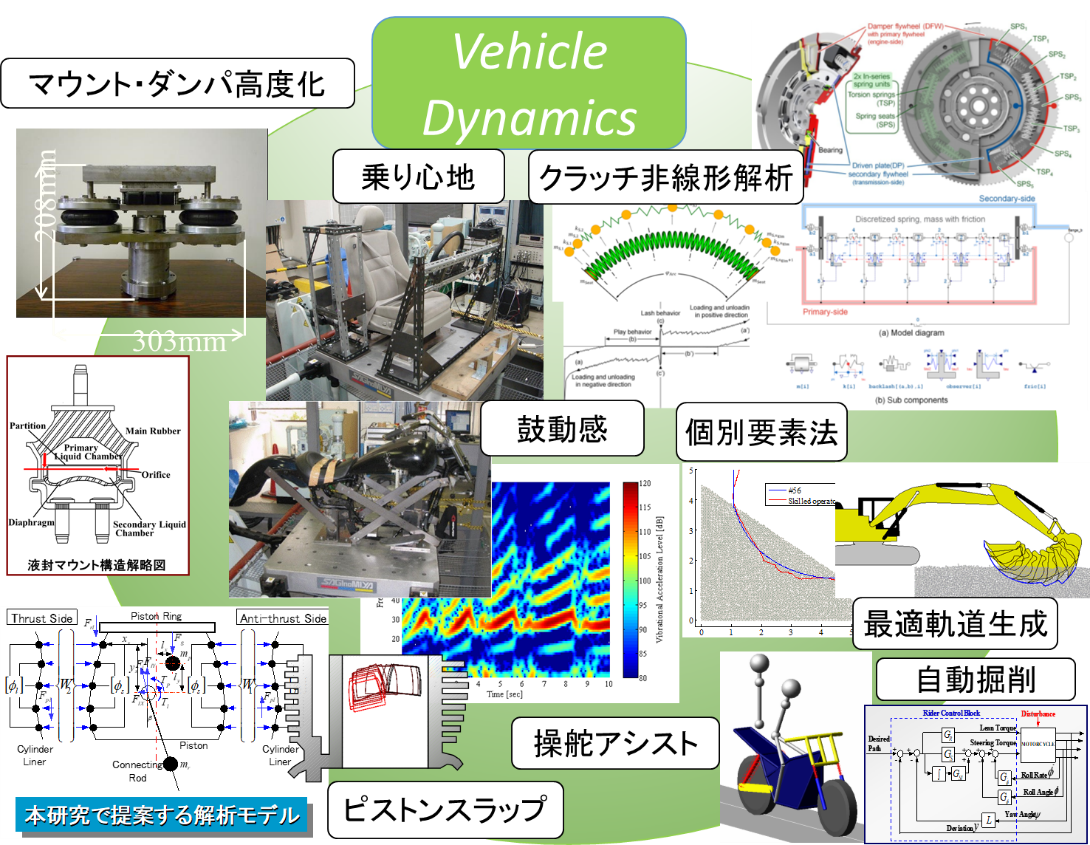
図2 乗用車,二輪車,大型車両のダイナミクス
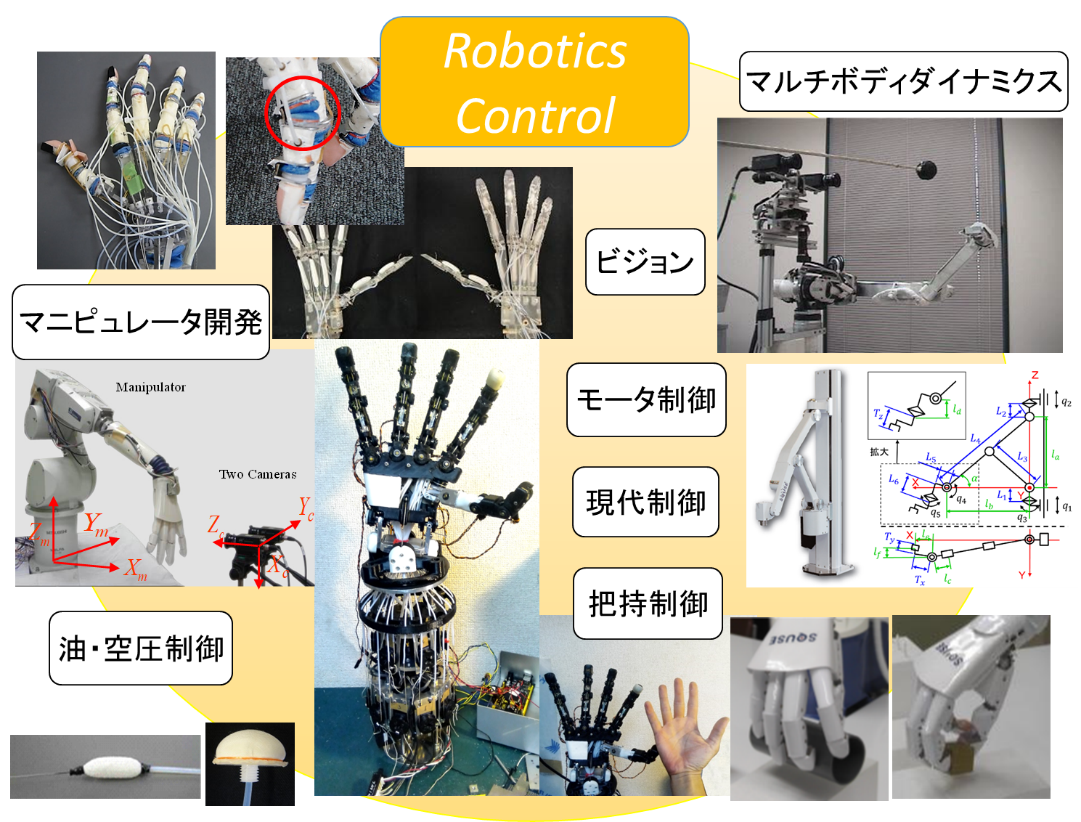
図3 ロボットのダイナミクスとその制御
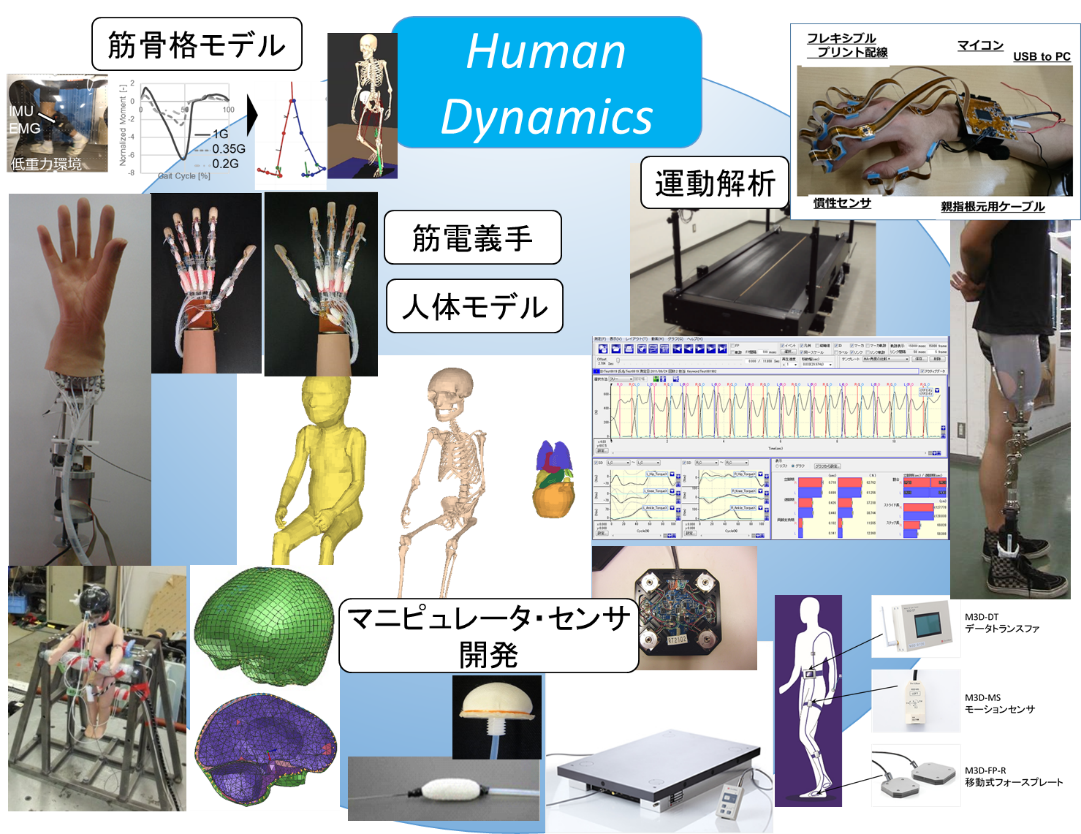
図4-1 人体のモデル化,スポーツダイナミクス
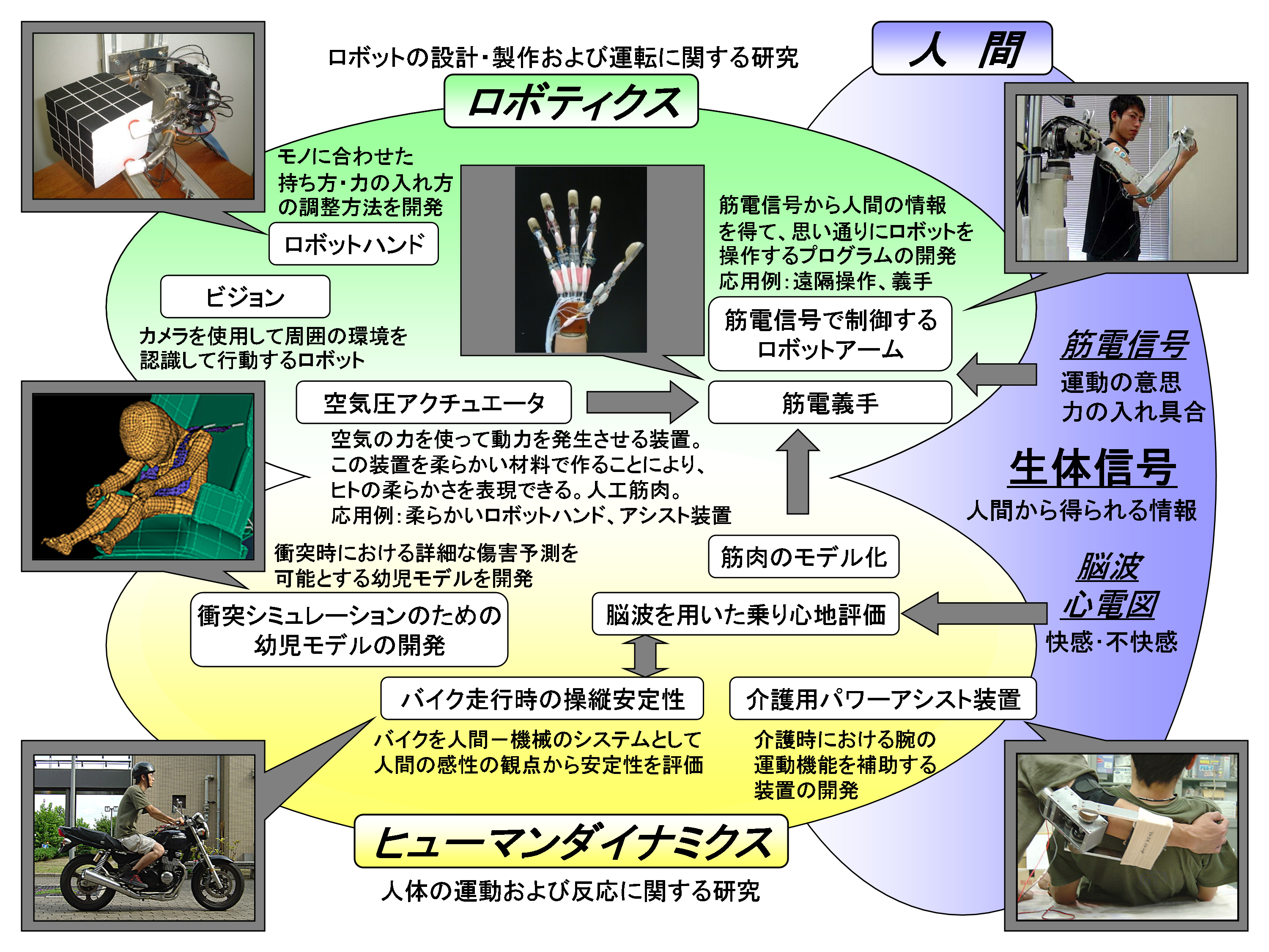
図4-2 人体のモデル化,スポーツダイナミクス
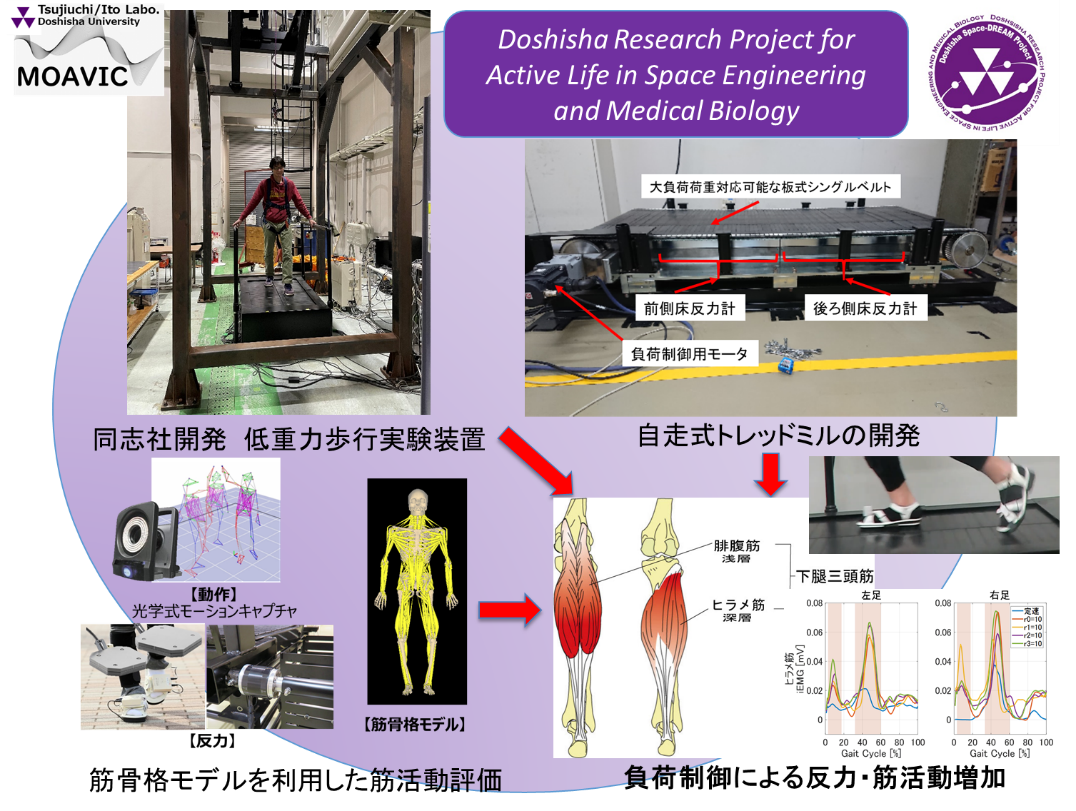
図5 宇宙生体医工学研究プロジェクト関連研究